Publications
LLM-driven symbolic planning and hierarchical imitation learning for long-horizon deformable object assembly
One-Sentence Summary (click here)
In this work, we propose a novel and robust framework that tightly integrates LLM-driven symbolic planning with hierarchical imitation learning to enable reliable and generalizable solutions for deformable object assembly.
Robotics and Computer-Integrated Manufacturing.
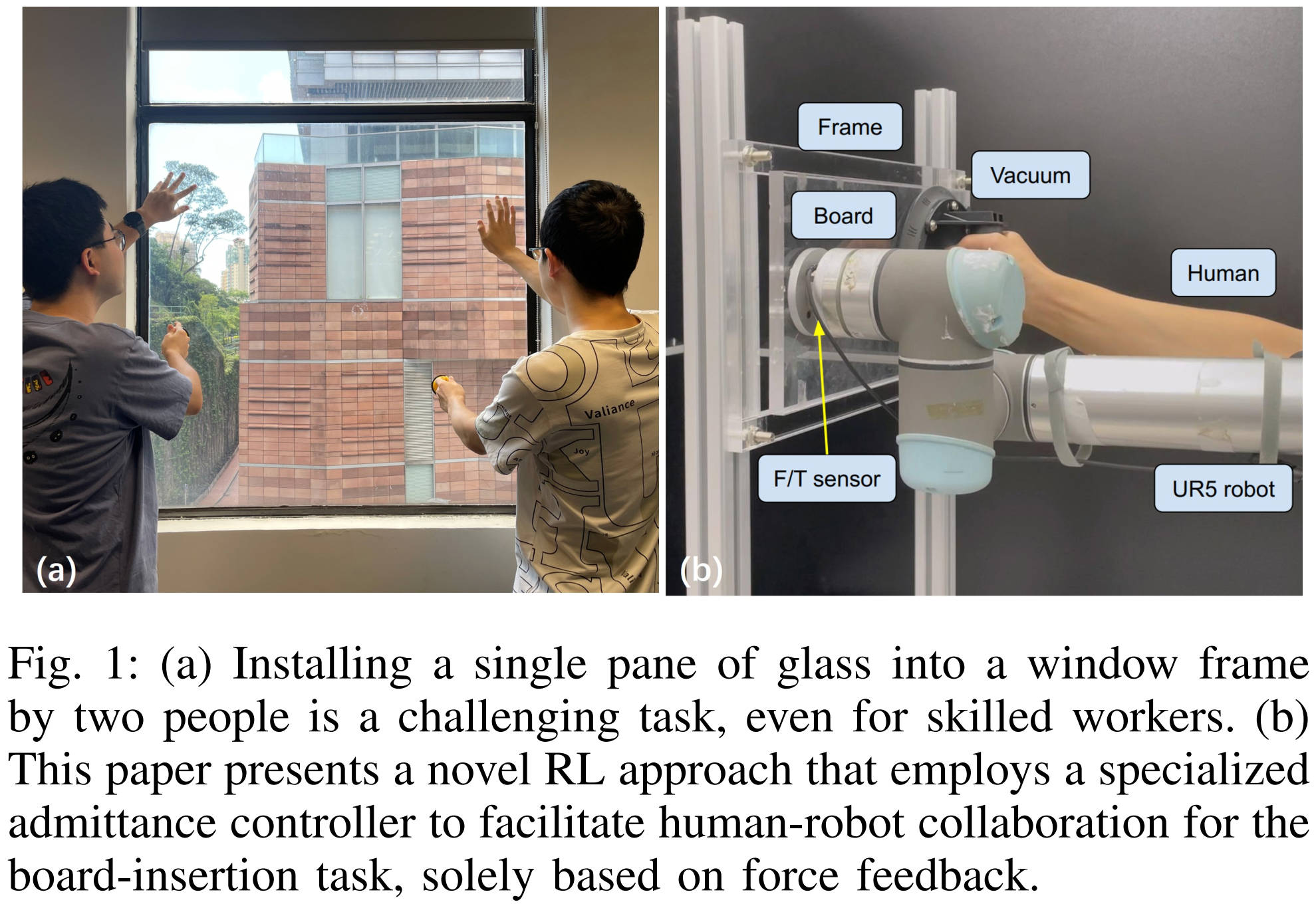
Collaborative Assembly Policy Learning of a Sightless Robot
One-Sentence Summary (click here)
This paper explores a physical human-robot collaboration (pHRC) task involving the joint insertion of a board into a frame by a sightless robot and a human operator. Here we propose a novel RL approach that utilizes a human-designed admittance controller to facilitate more active robot behavior and reduce human effort.
The 2025 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2025). Chengdu, China, December 3-7 2025.
🏅 Best Conference Paper Finalist
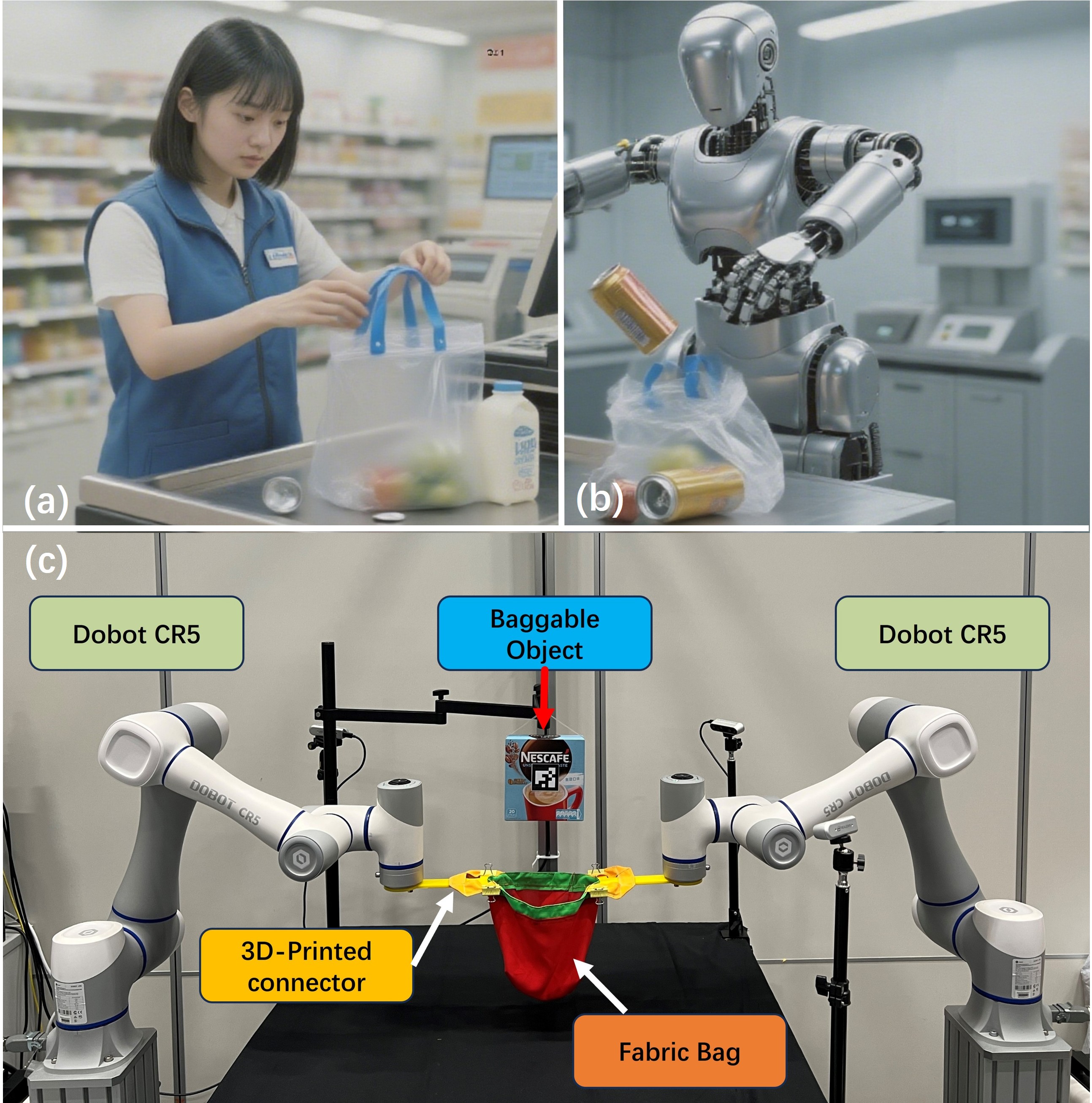
BagIt! An Adaptive Dual-Arm Manipulation of Fabric Bags for Object Bagging
One-Sentence Summary (click here)
The operation of deformable bags is very common in daily life, such as when the cashier bags products (a). However, this presents significant challenges for robots, mainly resulting from the complex and unpredictable nature of deformable bags (b). This paper proposes an efficient and robust dual-arm system for the task of object bagging by handling the fabric bag (c).
IEEE Robotics and Automation Letters.
🏅 Best Poster Award (Finalist) at IROS 2025 ROMADO Workshop [Link]
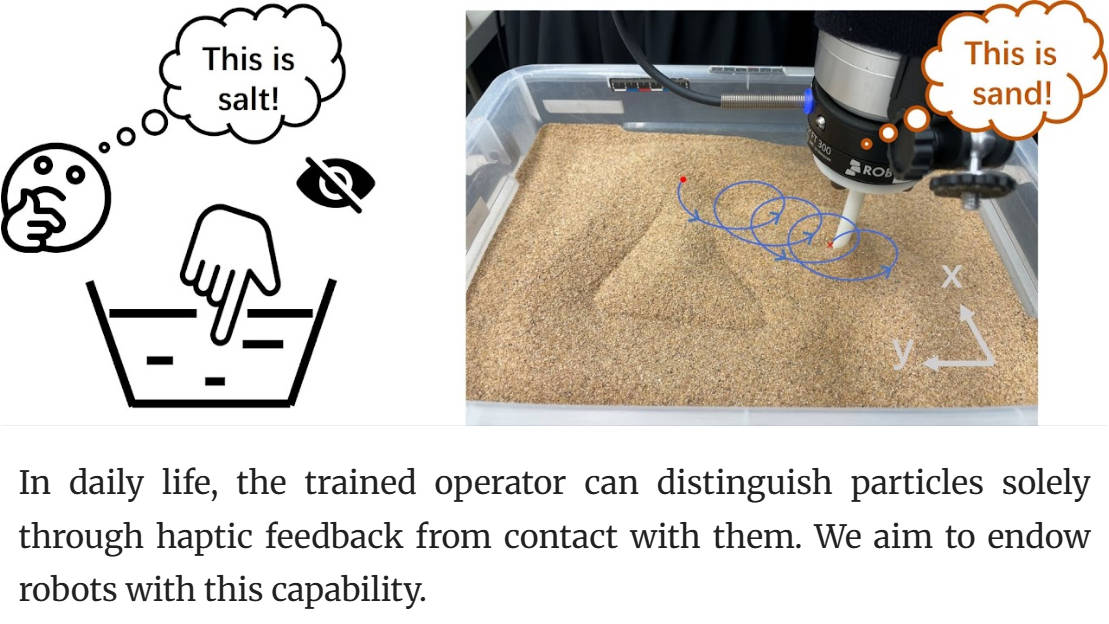
A Joint Learning of Force Feedback of Robotic Manipulation and Textual Cues for Granular Materials Classification
One-Sentence Summary (click here)
This paper presents GmClass, a non-visual classifier that utilizes the force feedback from robot-granules interaction, transforms the force sequences into the frequency domain, and integrates them with high-dimensional textual information within a two-branch architecture for multimodal supervised contrastive learning (MSCL).
IEEE Robotics and Automation Letters.
🏆 ESI Highly Cited Paper 🔥 Hot Paper
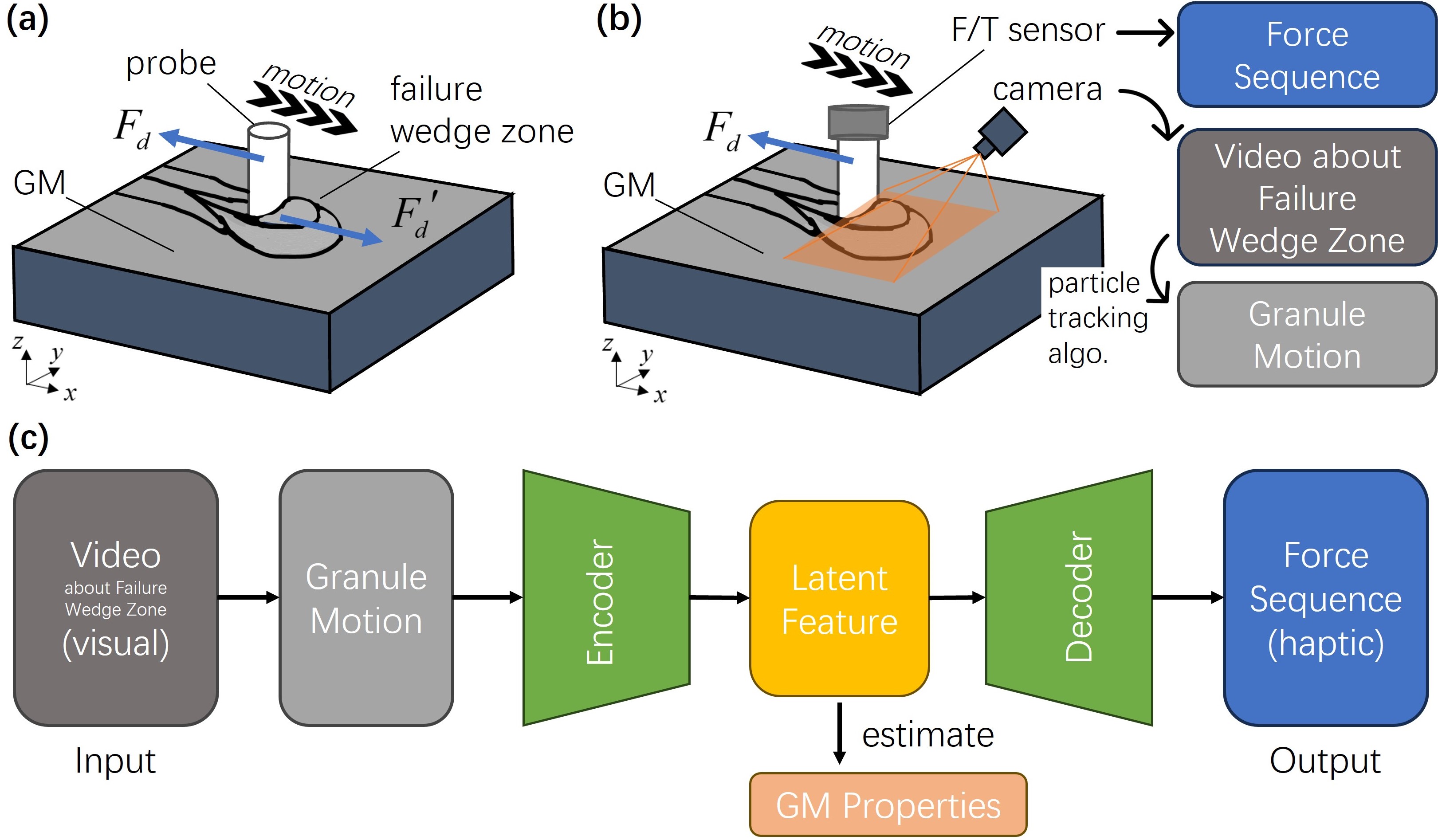
Understanding Particles From Video: Property Estimation of Granular Materials via Visuo-Haptic Learning
One-Sentence Summary (click here)
In this paper, we propose a useful method to estimate the relative distribution of granular material (GM) properties merely from the video of GM-probe interaction.
IEEE Robotics and Automation Letters.
CafkNet: GNN-Empowered Forward Kinematic Modeling for Cable-Driven Parallel Robots
One-Sentence Summary (click here)
To the best of our knowledge, it is the first study that employs the Graph Neural Network (GNN) to solve the forward kinematics (FK) problem for Cable-Driven Parallel Robots (CDPRs).

The 2024 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2024). Bangkok, Thailand, December 10-14 2024.
A Haptic-Based Proximity Sensing System for Buried Object in Granular Material
One-Sentence Summary (click here)
In this paper, we propose a simple yet effective proximity sensing system for underground stuff based on the haptic feedback of the sensor-granules interaction.
The 40th International Symposium of Robotics Research (ISRR). Long Beach, California, USA, December 8-12 2024.
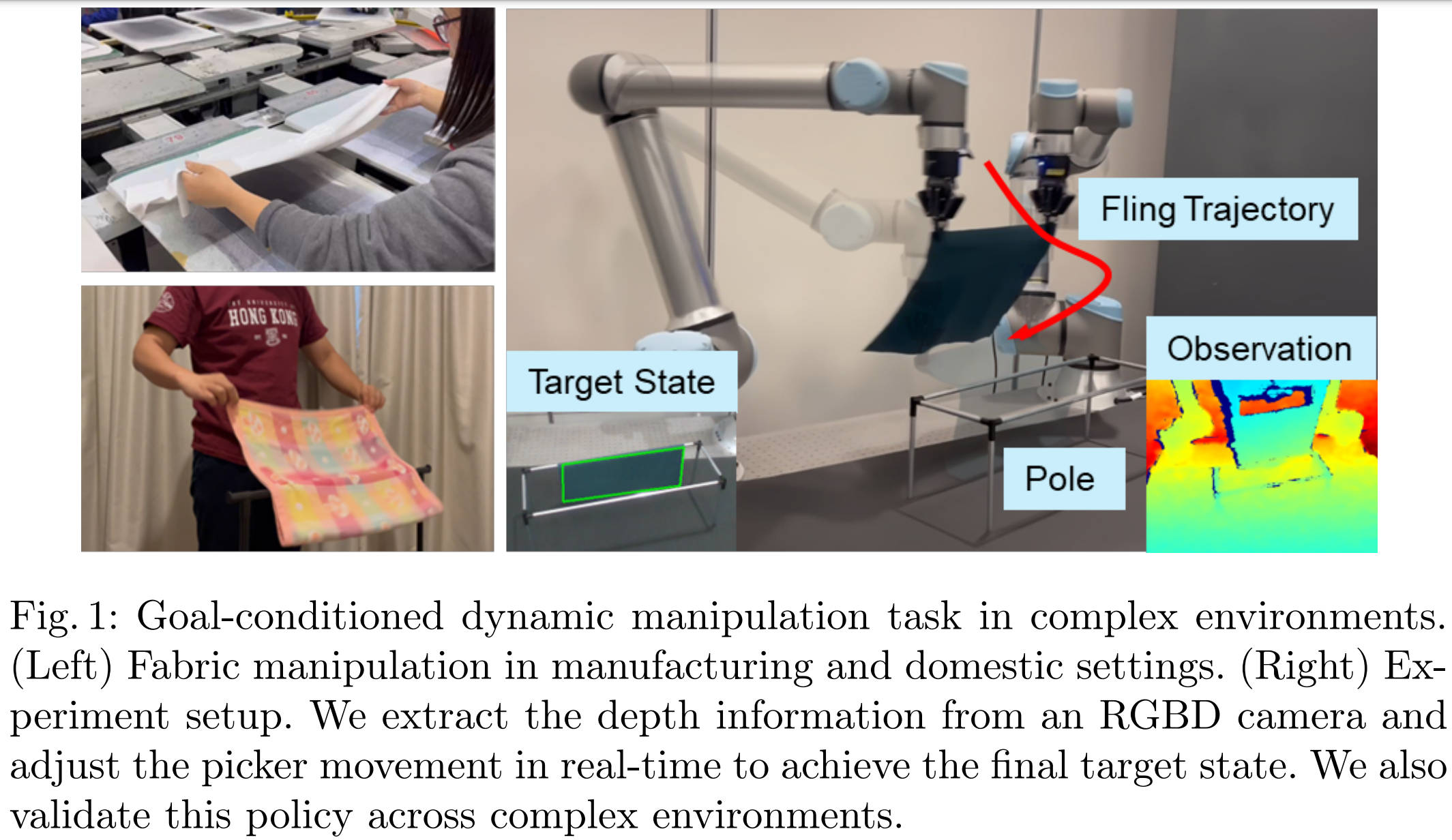
One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging
One-Sentence Summary (click here)
In this work, we present One Fling to Goal, an algorithm capable of handling fabric pieces with diverse shapes and physical properties across various scenarios.
The 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR). Chicago, USA, October 7-9 2024.
NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning
One-Sentence Summary (click here)
This paper presents NeuPAN: a real-time, highly-accurate, map-free, robot-agnostic, and environment-invariant robot navigation solution.
IEEE Transactions on Robotics (2025).
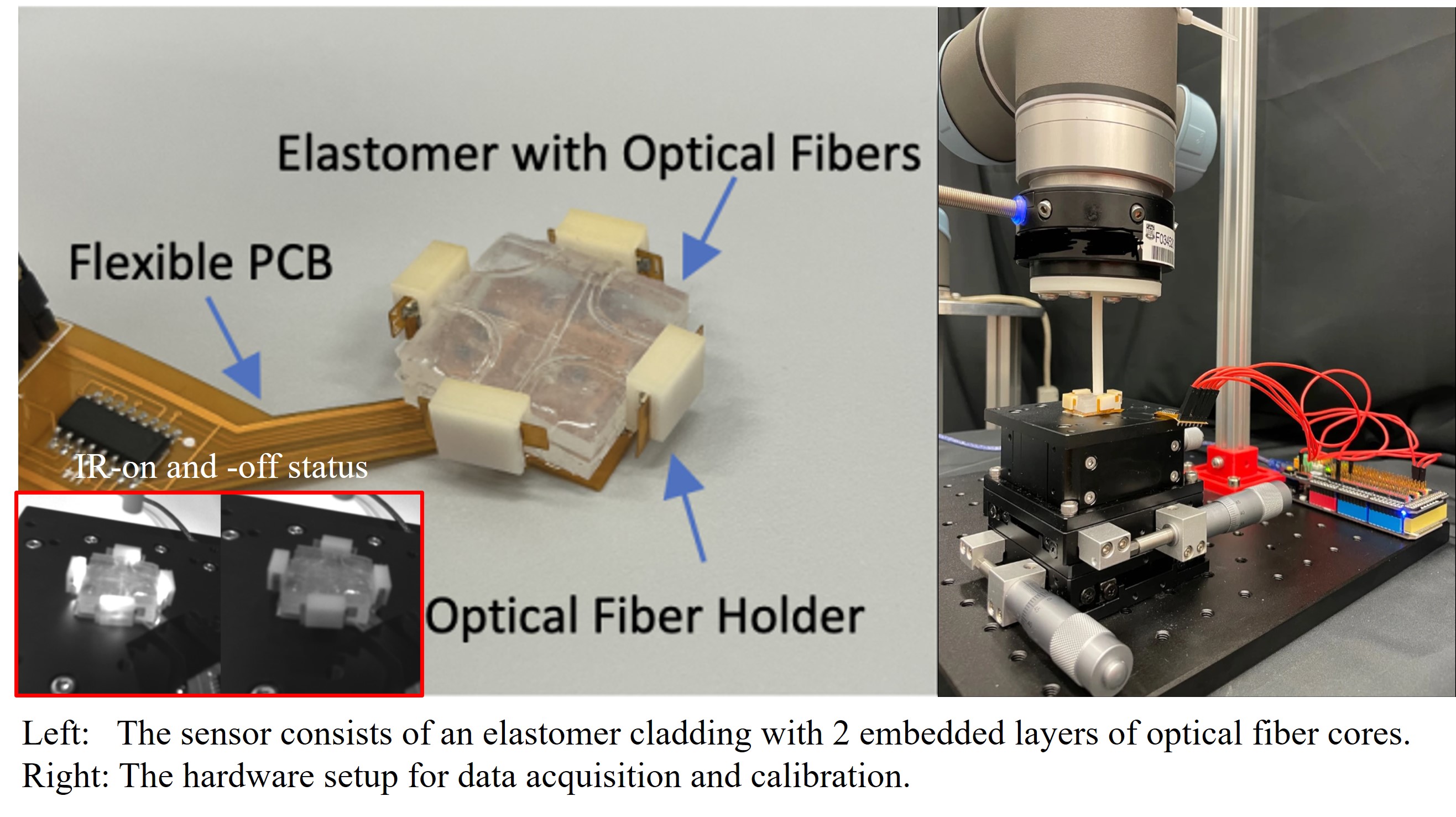
Polymer-based self-calibrated optical fiber tactile sensor
One-Sentence Summary (click here)
A soft tactile sensor w/ a two-layered weaved polymer-based optical fiber anisotropic structure embedded in a soft elastomer.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
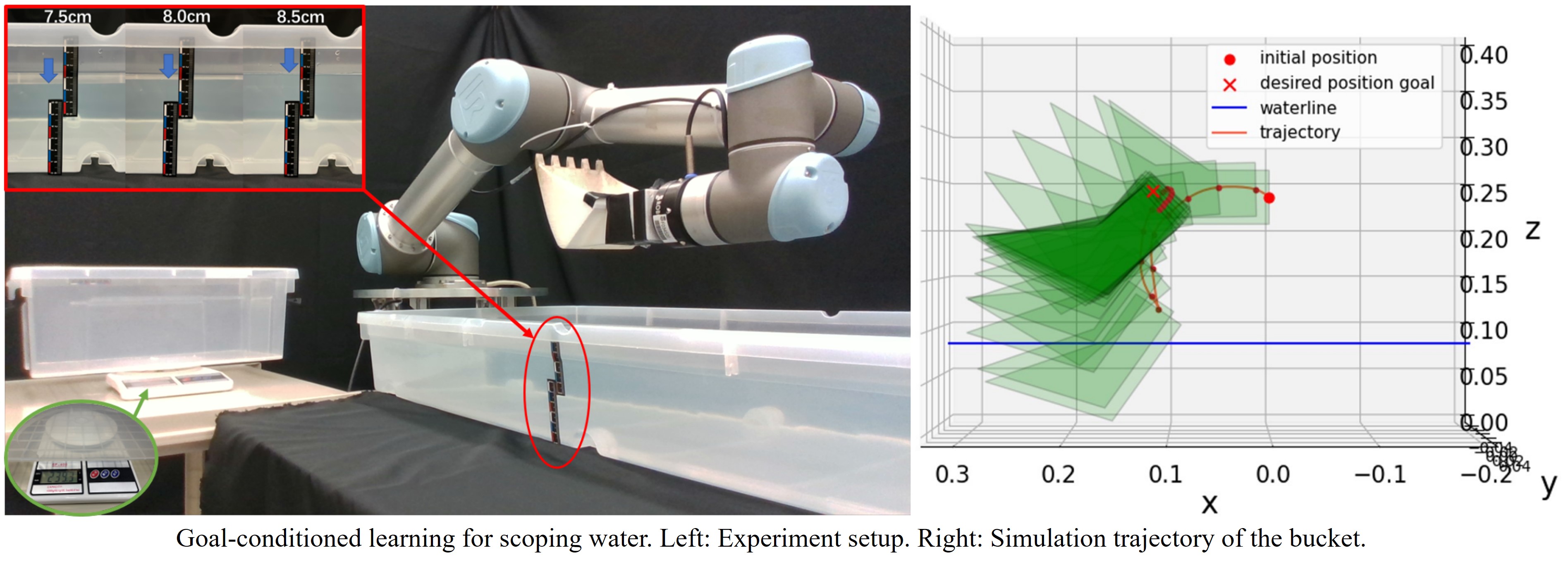
Goats: Goal sampling adaptation for scooping with curriculum reinforcement learning
One-Sentence Summary (click here)
In this work, we first formulate the problem of robotic water scooping using goal-conditioned reinforcement learning.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
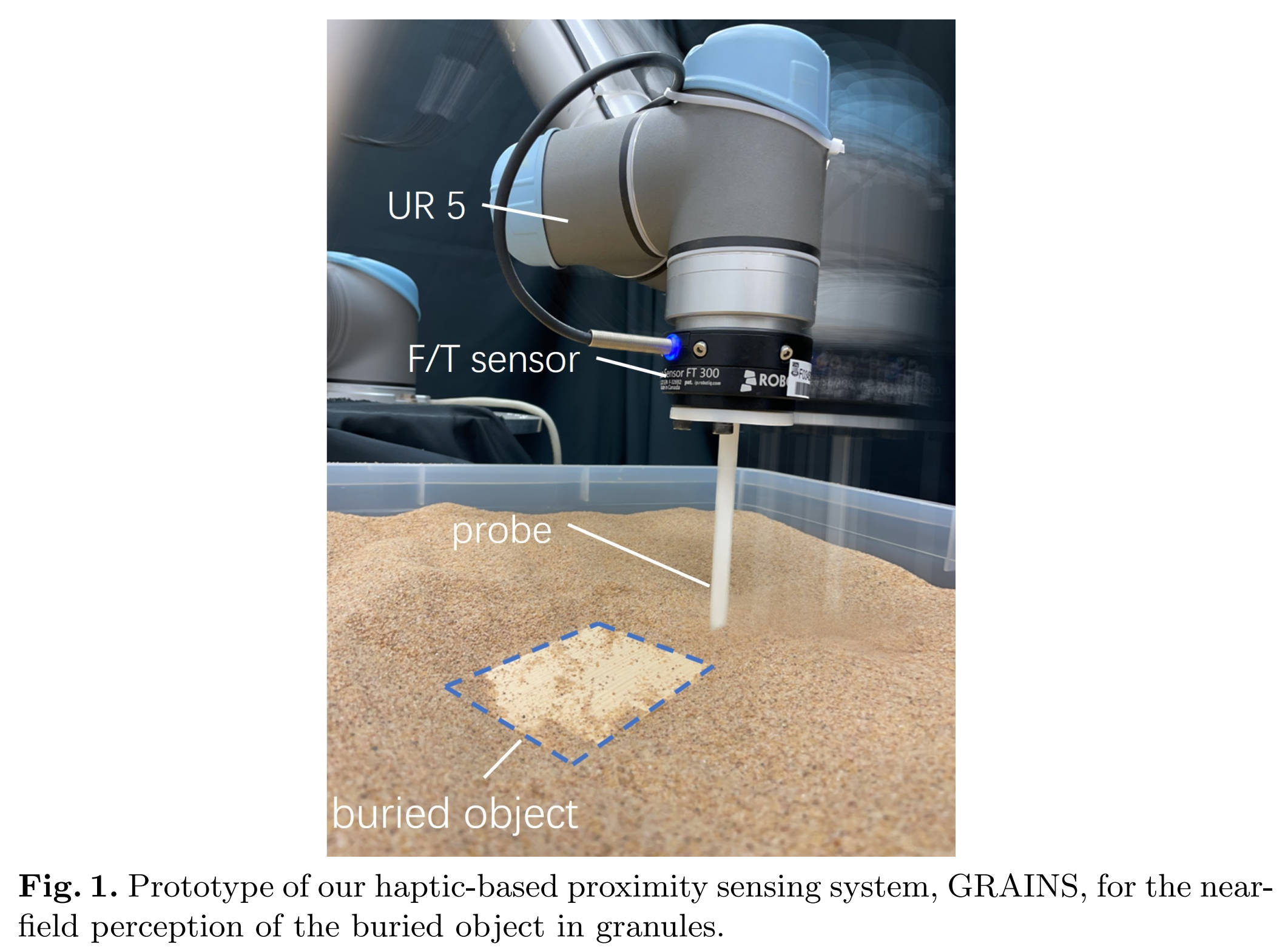
GRAINS: Proximity Sensing of Objects in Granular Materials
One-Sentence Summary (click here)
Detection of buried objects beneath granules in advance based on the study of proximity sensing.

in Submission.
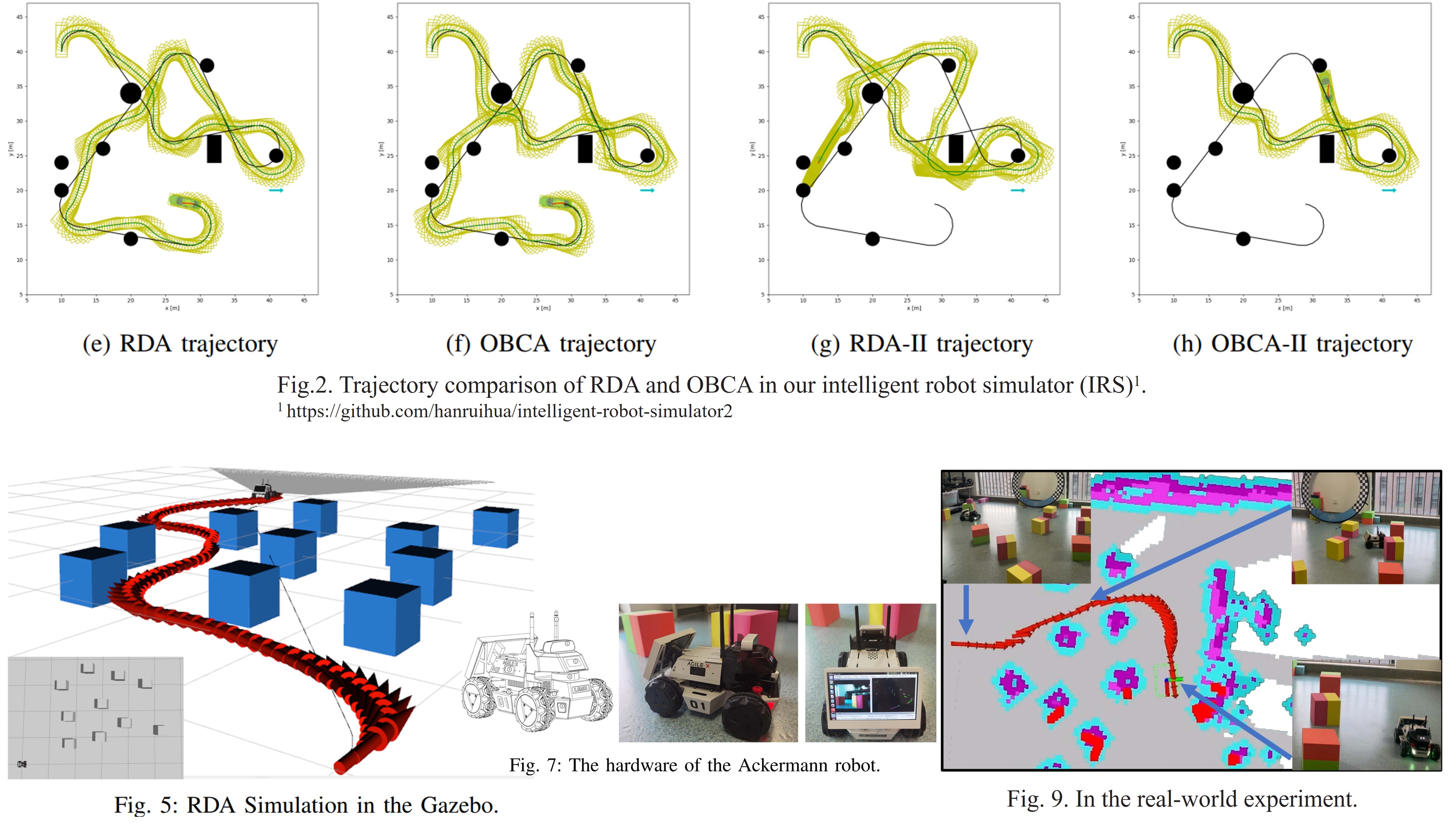
Rda: An accelerated collision free motion planner for autonomous navigation in cluttered environments
One-Sentence Summary (click here)
In this letter, we present an accelerated collision-free motion planner, namely regularized dual alternating direction method of multipliers (RDA for short), for the model predictive control (MPC) based motion planning problem.
IEEE Robotics and Automation Letters with IROS 2023.
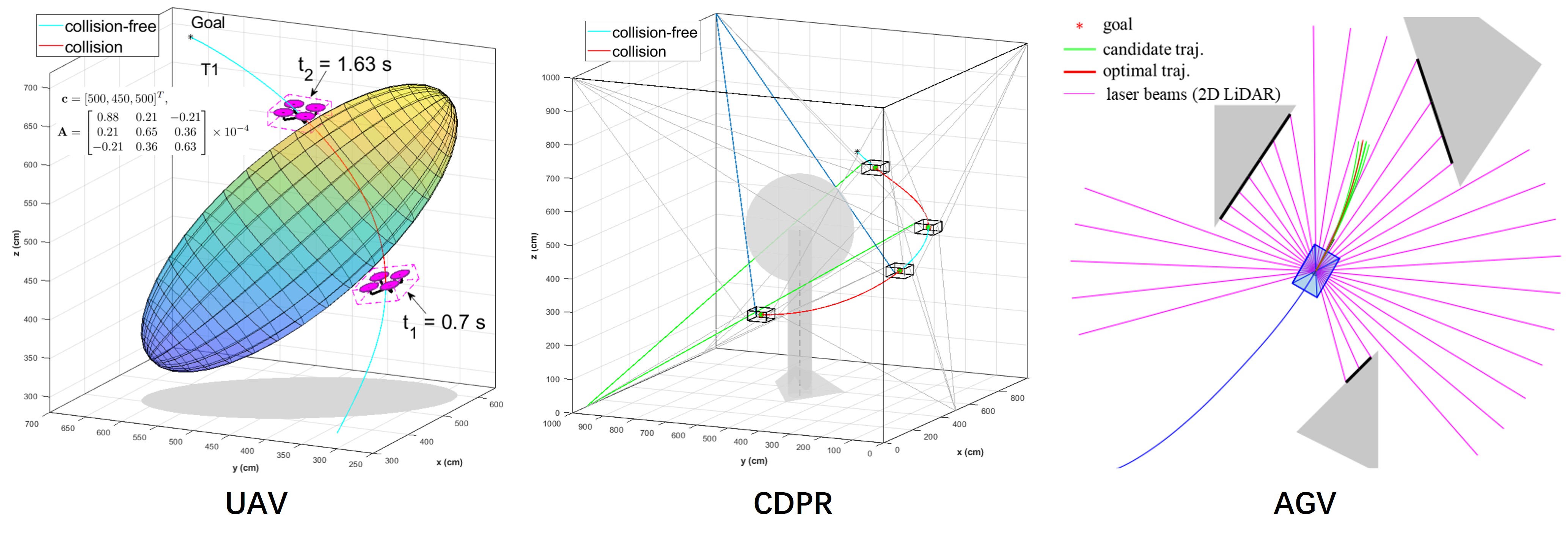
A generalized continuous collision detection framework of polynomial trajectory for mobile robots in cluttered environments
One-Sentence Summary (click here)
GCCD-PT: a continuous collision detection method that works in UAVs/AGVs/CDPRs.
IEEE Robotics and Automation Letters with IROS 2022.
Reinforcement learned distributed multi-robot navigation with reciprocal velocity obstacle shaped rewards
One-Sentence Summary (click here)
In this letter, we propose a distributed approach, RL-RVO, for multi-robot navigation combining reciprocal velocity obstacle (RVO) and deep reinforcement learning (DRL) to solve the reciprocal collision avoidance problem under limited information.

IEEE Robotics and Automation Letters with ICRA 2023.
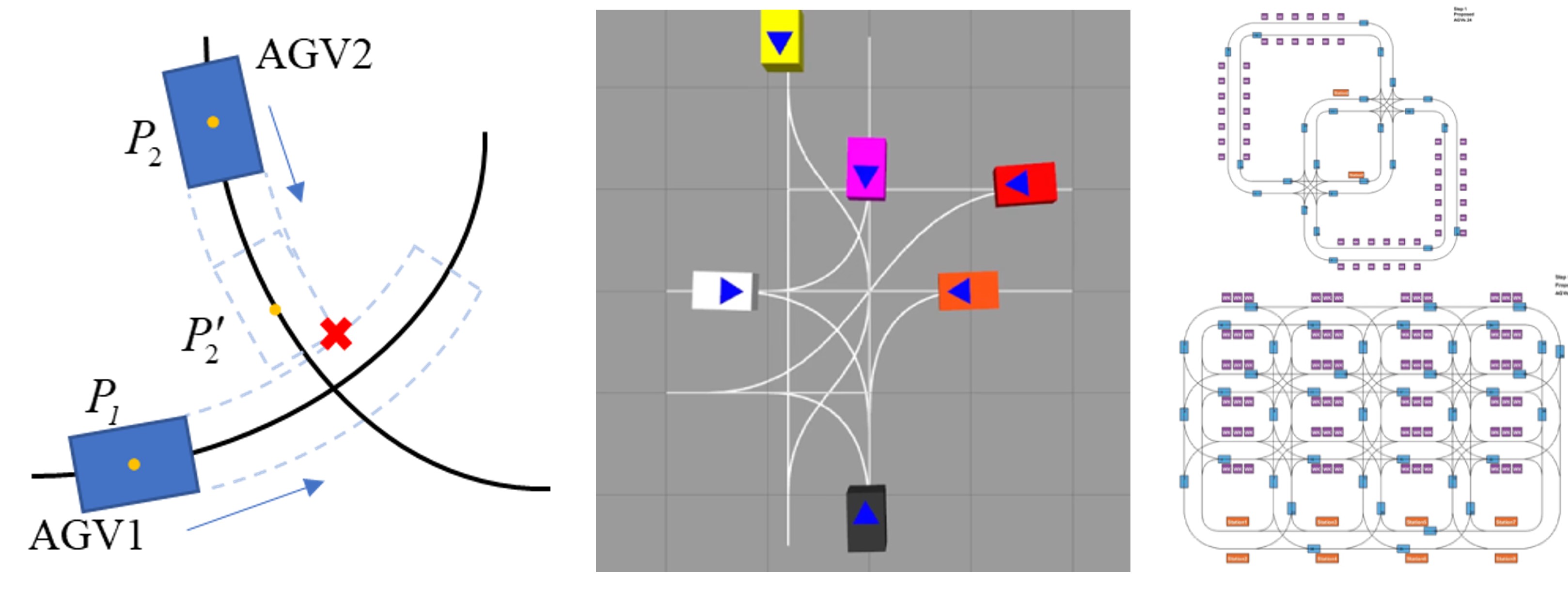
An efficient centralized planner for multiple automated guided vehicles at the crossroad of polynomial curves
One-Sentence Summary (click here)
A centralized planner w/ low computational burden to schedule multiple AGVs/mobile robots at the intersection of polynomial curves.
IEEE Robotics and Automation Letters.
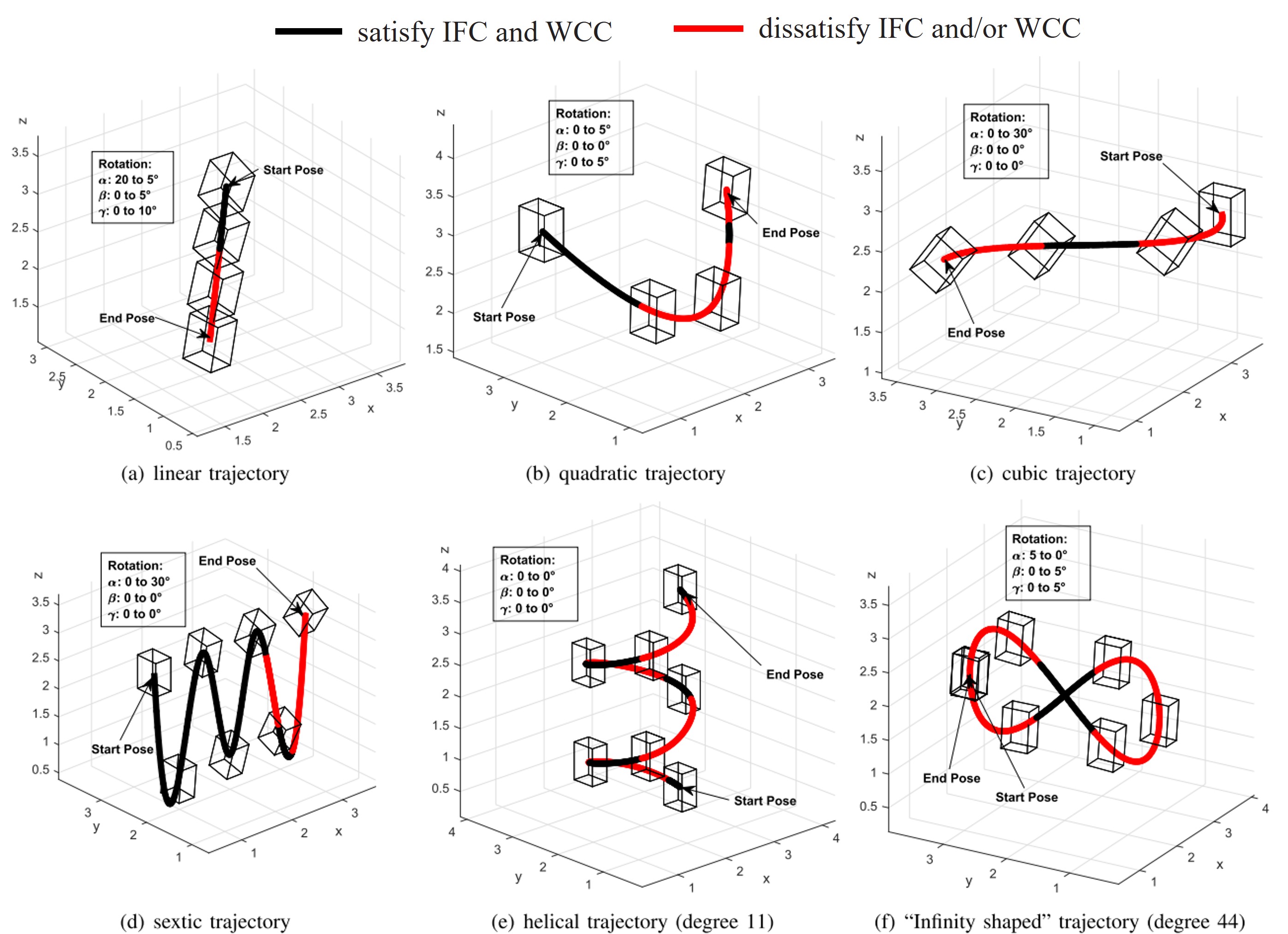
Efficient wrench-closure and interference-free conditions verification for cable-driven parallel robot trajectories using a ray-based method
One-Sentence Summary (click here)
A ray-based method to check interference-free condition (IFC) and wrench-closure condition (WCC) along the given polynomial paths for cable-driven parallel robots (CDPRs).
IEEE Robotics and Automation Letters.
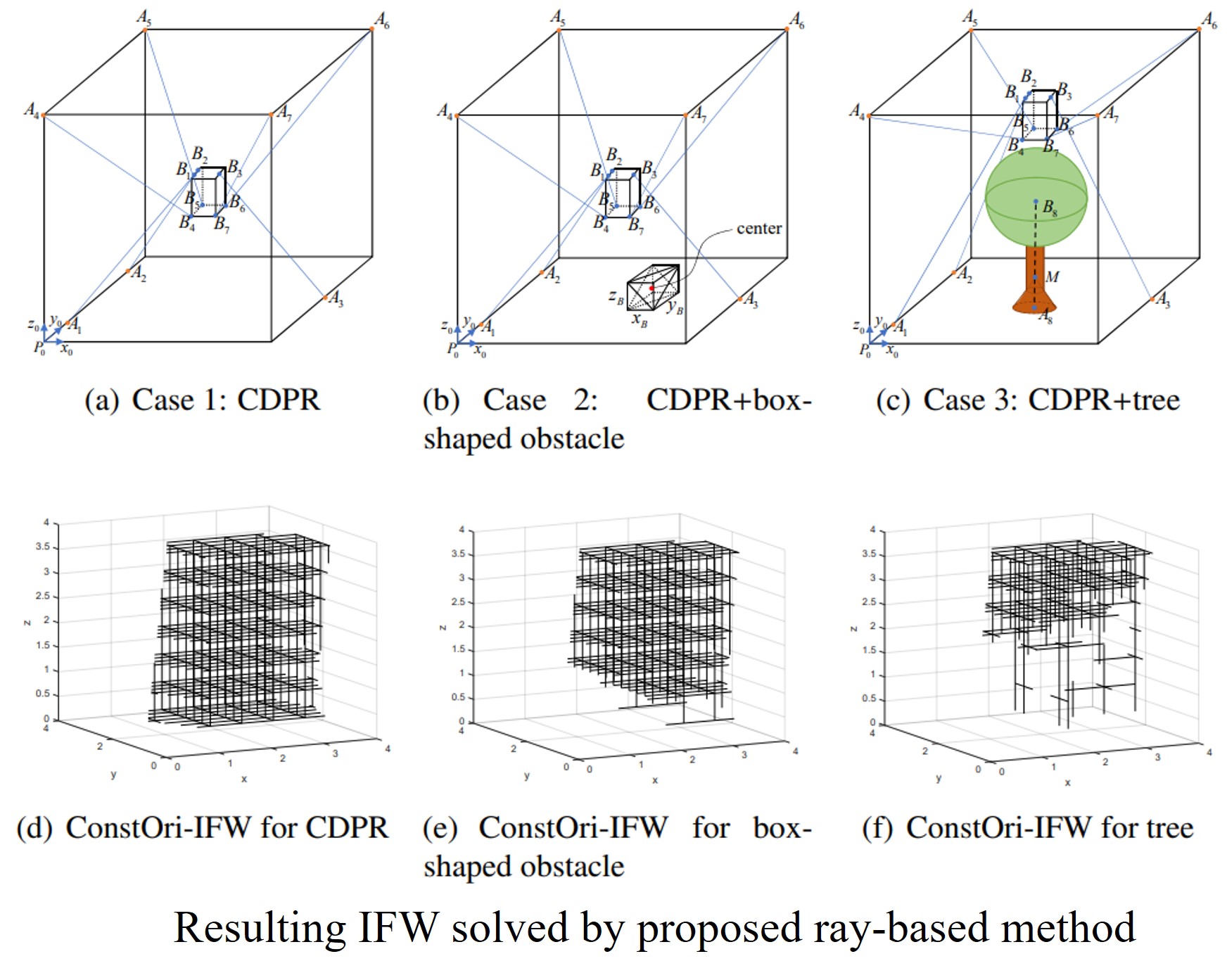
Ray-based Interference Free Workspace Analysis and Path Planning for Cable-Driven Robots
One-Sentence Summary (click here)
This thesis studies the interference-free workspace (IFW) of arbitrary cable-driven robots (CDRs) for both cables and obstacles using ray-based method, followed by the point-to-point path planning and verification technique to ensure that the resulting motion is within the workspace.
M.Phil. Thesis. The Chinese University of Hong Kong.
* Equal authorship # Corresponding authorship
